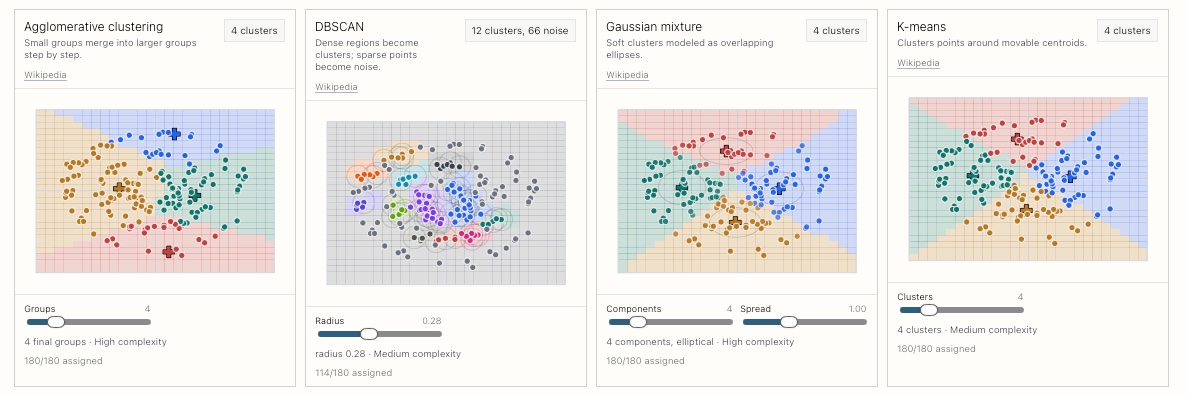
The other day, I was tinkering with model parameters and second-guessing myself. I wondered, wouldn’t it be cool if i could compare side by side the results of different models? Yeah, it would. I ended up building a small interactive explainer for seeing how different classification and clustering approaches behave on the same two-dimensional data.… Continue reading Classification, visualized
Best of
A curated selection of Daniel Pradilla articles on technology, software, work, and practical problem-solving.
Flipasio
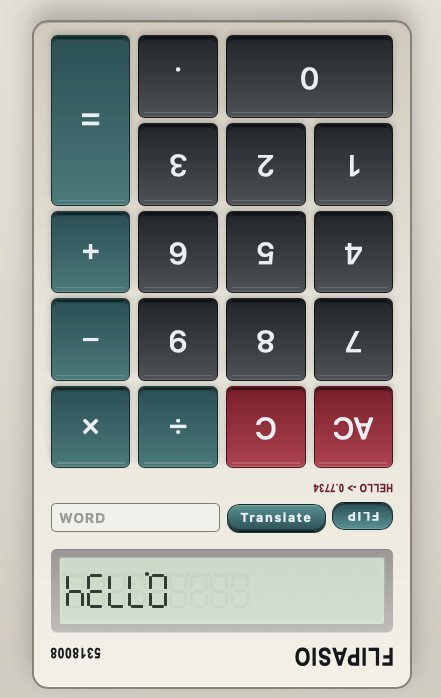
My eldest daughter recently discovered the classic LCD calculator trick: type certain numbers, flip it, and make it spell words. She was thrilled to show me, and I was just as excited watching her find that little “useless” easter egg that entertained me during way too many hours in classes that I should’ve paid more… Continue reading Flipasio
EchoTree
For years now I kept some of my social accounts alive with a Python script. It read from a collection of RSS feeds and shared at random times. It worked, my feeds stayed active, and people asked me what was I doing reading at 3am. The script had a bit of personality: it logged out… Continue reading EchoTree
5 lessons I learned playing with Clawdbot, a local agentic assistant
I’ve spent the last few weeks playing with Clawdbot. My instance is named Clawd. If you haven’t seen this category yet: think “chat assistant”, but with hands. It can run commands, write files, poke your integrations, and generally do the annoying glue-work you normally do by tab-switching and copy/pasting. TL;DR Clawdbot lets you go from… Continue reading 5 lessons I learned playing with Clawdbot, a local agentic assistant
Classifying fruits with a Convolutional Neural Network in Keras

I followed a tutorial on Convolutional Neural Networks that left many questions unanswered. Soon I realized that the actual process of architecting a Neural Network and setting the parameters seemed to be much more experimental than I thought. It took a while to find explanations that a rookie like me could understand. Most of the… Continue reading Classifying fruits with a Convolutional Neural Network in Keras